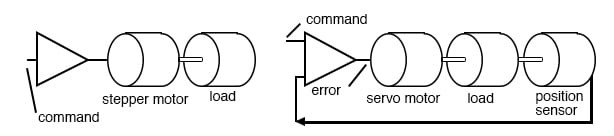
스테퍼 모터 대 서보 모터
스테퍼 모터는 전기 모터의 "디지털" 버전입니다. 로터는 기존 모터처럼 지속적으로 회전하는 것이 아니라 명령에 따라 개별 단계로 움직입니다. 멈췄지만 전원이 공급되면 스테퍼 (스테퍼 모터의 약자)는 홀딩 토크 로 부하를 일정하게 유지합니다 .
지난 20년 동안 스테퍼 모터가 널리 받아들여진 것은 디지털 전자 기술의 발전 덕분이었습니다. 현대의 솔리드 스테이트 드라이버 전자 기술은 스테퍼 모터의 성공에 중요한 열쇠였습니다. 그리고 마이크로프로세서는 스테퍼 모터 드라이버 회로와 쉽게 인터페이스할 수 있습니다.
응용 측면에서 스테퍼 모터의 전신은 서보 모터였습니다. 오늘날 이것은 고성능 모션 제어 응용 프로그램에 대한 더 높은 비용 솔루션입니다. 서보 모터의 비용과 복잡성은 추가 시스템 구성 요소(위치 센서 및 오류 증폭기) 때문입니다. 여전히 저전력 스테퍼의 이해 범위를 넘어서는 무거운 하중을 배치하는 방법입니다.
높은 가속도 또는 비정상적으로 높은 정확도는 여전히 서보 모터를 필요로 합니다. 그렇지 않으면 간단한 구동 전자 장치, 좋은 정확도, 좋은 토크, 적당한 속도 및 낮은 비용으로 인해 스테퍼가 기본입니다.
스테퍼 모터 대 서보 모터
스테퍼 모터는 플로피 드라이브에서 읽기-쓰기 헤드를 위치시킵니다. 한때 하드 드라이브에서도 같은 목적으로 사용되었습니다. 그러나 최신 하드 드라이브 헤드 위치 지정에 필요한 높은 속도와 정확성을 위해서는 선형 서보모터(음성 코일)를 사용해야 합니다.
서보 앰프는 통합하기 어려운 일부 이산 구성 요소가 있는 선형 앰프입니다. 기계 구성 요소에 대한 서보 앰프 이득 대 위상 응답을 최적화하려면 상당한 설계 노력이 필요합니다. 스테퍼 모터 드라이버는 덜 복잡한 솔리드 스테이트 스위치로 "켜짐" 또는 "꺼짐"입니다. 따라서 스테퍼 모터 컨트롤러는 서보 모터 컨트롤러보다 덜 복잡하고 비용이 많이 듭니다.
Slo-syn 동기 모터는 단상 영구 커패시터 유도 모터처럼 AC 라인 전압에서 작동할 수 있습니다. 커패시터는 90 ° 2차 위상을 생성합니다. 직류 전압으로 2상 구동이 가능합니다.
요즘에는 2-24V의 바이폴라 (±) 사각파 의 구동 파형이 더 흔합니다. 바이폴라 자기장은 중앙 탭 권선의 교대 끝에 적용되는 단극 (한 극성) 전압에서 생성될 수도 있습니다(아래 그림).
즉, DC는 모터로 전환되어 AC를 볼 수 있습니다. 권선이 순서대로 활성화되면 로터는 그에 따른 스테이터 자기장 과 동기화됩니다 . 따라서 스테퍼 모터를 AC 동기 모터의 한 종류로 취급합니다.

(b)의 중앙탭 코일의 단극 구동은 (a)의 단일 코일에서 AC 전류를 에뮬레이트합니다.
형질
스테퍼 모터는 회전자에 권선 슬립 링이나 정류자가 없기 때문에 견고하고 저렴합니다. 회전자는 원통형 고체이며 돌출 극이나 미세한 이빨이 있을 수도 있습니다. 회전자는 영구 자석 인 경우가 많습니다 .
로터가 영구 자석인지는 동력이 공급되지 않은 손 회전으로 디텐트 토크 , 토크 맥동을 통해 확인할 수 있습니다 . 스테퍼 모터 코일은 캔 스택 구조 를 제외하고 적층 스테이터 내부에 감겨 있습니다 . 권선 단계는 최소 2개에서 최대 5개까지 있을 수 있습니다.
이러한 위상은 종종 쌍으로 나뉩니다. 따라서 4극 스테퍼 모터는 90 ° 간격 으로 배치된 인라인 쌍의 극으로 구성된 두 위상을 가질 수 있습니다 . 위상당 여러 극 쌍이 있을 수도 있습니다. 예를 들어, 12극 스테퍼는 위상당 3쌍인 6쌍의 극을 갖습니다.
스테퍼 모터는 반드시 연속적으로 회전하지 않기 때문에 마력 정격이 없습니다. 연속적으로 회전하더라도 분수 마력 정격 용량에 근접하지도 않습니다. 다른 모터에 비해 진정으로 작고 저전력 장치입니다.
이들은 4kg 크기의 단위에 대해 1,000 in-oz(인치-온스) 또는 10 Nm(뉴턴-미터)의 토크 정격을 가지고 있습니다. 작은 "다임" 크기 스테퍼는 뉴턴-미터의 1/100 또는 몇 인치-온스의 토크를 가지고 있습니다. 대부분의 스테퍼는 직경이 몇 인치이고 토크는 nm의 일부 또는 몇 in-oz입니다.
사용 가능한 토크는 아래의 속도 대 토크 곡선 에 설명된 대로 모터 속도, 부하 관성, 부하 토크 및 구동 전자 장치의 함수입니다 . 전원이 공급되고 유지되는 스테퍼는 비교적 높은 유지 토크 정격을 갖습니다. 작동 중인 모터의 경우 사용 가능한 토크가 적고 일부 고속에서는 0으로 감소합니다.
이 속도는 모터 부하 조합의 기계적 공진으로 인해 달성할 수 없는 경우가 많습니다.

스테퍼 속도 특성
스테퍼 모터는 한 번에 한 단계씩 움직이며, 구동 파형이 변경될 때의 스텝 각도 입니다. 스텝 각도는 모터 구조 세부 사항, 즉 코일 수, 극 수, 이빨 수와 관련이 있습니다. 90 ° 에서 0.75 ° 까지 가능하며 , 회전당 4~500단계에 해당합니다.
구동 전자 장치는 회전자를 반 단계 로 움직여 스텝 각도를 절반으로 줄일 수 있습니다 .
스테퍼는 속도-토크 곡선의 속도를 즉시 달성할 수 없습니다. 최대 시작 주파수는 정지되고 무부하된 스테퍼가 시작될 수 있는 가장 높은 속도입니다. 모든 부하가 이 매개변수를 달성할 수 없게 만듭니다.
실제로, 스텝 속도는 최대 시작 주파수보다 훨씬 낮은 상태에서 시작하는 동안 램프업됩니다. 스테퍼 모터를 정지할 때, 정지하기 전에 스텝 속도가 감소할 수 있습니다.
스테퍼가 시작하고 멈출 수 있는 최대 토크는 풀인 토크 입니다 . 스테퍼의 이 토크 부하는 모터 샤프트의 마찰(브레이크) 및 관성(플라이휠) 부하 때문입니다. 모터가 속도에 도달하면 풀아웃 토크가 스텝을 잃지 않고 지속 가능한 최대 토크입니다.
스테퍼 모터에는 복잡성이 증가하는 순서대로 세 가지 유형이 있습니다. 가변 릴럭턴스, 영구 자석 및 하이브리드입니다. 가변 릴럭턴스 스테퍼는 돌출 극이 있는 솔리드 소프트 스틸 로터를 가지고 있습니다. 영구 자석 스테퍼는 원통형 영구 자석 로터를 가지고 있습니다.
하이브리드 스테퍼 모터는 영구 자석 로터에 부드러운 강철 이빨을 추가하여 스텝 각도를 더 작게 만듭니다.
가변 릴럭턴스 스테퍼
가변 릴럭턴스 스테퍼 모터는 자기 회로를 통한 가장 낮은 릴럭턴스 경로를 찾는 자속에 의존합니다. 즉, 불규칙한 모양의 연성 자기 로터가 움직여 자기 회로를 완성하여 높은 릴럭턴스 공기 간격의 길이를 최소화합니다.
스테이터는 일반적으로 극 쌍 사이에 분산된 3개의 권선을 갖고, 로터는 4개의 돌출 극을 갖고 있어 30 ° 스텝 각도를 생성합니다. 손으로 돌릴 때 디텐트 토크가 없는 전원이 꺼진 스테퍼는 가변 릴럭턴스 유형 스테퍼로 식별할 수 있습니다.

3상 및 4상 가변 릴럭턴스 스테퍼 모터
3-φ 스테퍼의 구동 파형은 "릴럭턴스 모터" 섹션에서 볼 수 있습니다. 4-φ 스테퍼의 구동은 아래 그림에 나와 있습니다. 스테이터 위상을 순차적으로 전환하면 회전 자기장이 생성되고 로터는 이를 따릅니다.
그러나 로터 극의 수가 적기 때문에 로터는 각 단계마다 스테이터 각도보다 적게 움직입니다. 가변 릴럭턴스 스테퍼 모터의 경우 단계 각도는 다음과 같습니다.
ΘS = 360o/NS ΘR = 360o/NR ΘST = ΘR - ΘS 여기서: ΘS = 스테이터 각도, ΘR = 로터 각도, ΘST = 스텝 각도 NS = 스테이터 극 수, NP = 로터 극 수
가변 릴럭턴스 스테퍼의 스테핑 시퀀스
위의 그림에서 φ1에서 φ2 등으로 이동하면 스테이터 자기장은 시계 방향으로 회전합니다. 로터는 반시계 방향(CCW)으로 이동합니다. 어떤 일이 일어나지 않는지 주목하세요! 점선으로 표시된 로터 이빨은 다음 스테이터 이빨로 이동하지 않습니다. 대신 φ2 스테이터 자기장은 로터를 CCW로 이동하면서 다른 이빨을 끌어당기는데, 이는 스테이터 각도 30 ° 보다 작은 각도(15 ° )입니다 .
45 ° 의 로터 이빨 각도는 위의 방정식에 의해 계산에 들어갑니다. 로터는 45 ° 에서 다음 로터 이빨로 CCW로 이동했지만 30 ° 스테이터 이빨 로 CW와 정렬됩니다 . 따라서 실제 스텝 각도는 45 ° 의 스테이터 각도 와 30°의 로터 각도 의 차이입니다 .
로터와 스테이터의 이빨 수가 같다면 스테퍼는 얼마나 회전할까요? 0 - 표기 없음.
정지 상태에서 위상 φ1에 전원이 공급되면, "점선" 로터 이를 다음 CCW 스테이터 이에 정렬하기 위해 3개의 펄스(φ2, φ3, φ4)가 필요합니다. 이는 45 ° 입니다 . 스테이터 이당 3개의 펄스와 8개의 스테이터 이를 사용하면 24개의 펄스 또는 스텝이 로터를 360 ° 로 이동합니다 .
펄스 순서를 역전하면 회전 방향이 오른쪽 위에서 역전됩니다. 방향, 스텝 속도 및 스텝 수는 드라이버 또는 앰프에 공급하는 스테퍼 모터 컨트롤러에 의해 제어됩니다. 이것은 단일 회로 기판으로 결합될 수 있습니다.
컨트롤러는 마이크로프로세서 또는 특수 집적 회로일 수 있습니다. 드라이버는 선형 증폭기가 아니라 스테퍼에 전원을 공급할 만큼 충분히 높은 전류를 공급할 수 있는 간단한 온오프 스위치입니다. 원칙적으로 드라이버는 각 위상에 대한 릴레이 또는 토글 스위치일 수 있습니다. 실제로 드라이버는 이산 트랜지스터 스위치 또는 집적 회로입니다.
드라이버와 컨트롤러는 모두 직접 명령과 스텝 펄스를 수용하는 단일 통합 회로로 결합될 수 있습니다. 적절한 위상에 순서대로 전류를 출력합니다.

가변 릴럭턴스 스테퍼 모터
릴럭턴스 스테퍼를 분해하여 내부 구성 요소를 볼 수 있습니다. 가변 릴럭턴스 스테퍼 모터의 내부 구조는 위 그림에 나와 있습니다. 회전자는 돌출된 극을 가지고 있어서 회전하는 스테이터 필드가 전환될 때 끌릴 수 있습니다. 실제 모터는 우리의 단순화된 그림보다 훨씬 더 깁니다.

가변 릴럭턴스 스테퍼 드라이브 리드 스크류
샤프트에는 종종 드라이브 나사(위 그림)가 장착됩니다. 이것은 플로피 드라이브 컨트롤러의 명령에 따라 플로피 드라이브의 헤드를 움직일 수 있습니다.
가변 릴럭턴스 스테퍼 모터는 적당한 수준의 토크만 필요하고 거친 스텝 각도가 적절할 때 적용됩니다. 플로피 디스크 드라이브에 사용되는 나사 드라이브는 이러한 응용 프로그램입니다. 컨트롤러가 전원을 켜면 캐리지의 위치를 알 수 없습니다.
그러나 캐리지를 광학 인터럽터 쪽으로 구동하여 나이프 엣지가 인터럽터를 절단하는 위치를 "홈"으로 교정할 수 있습니다. 컨트롤러는 이 위치에서 스텝 펄스를 계산합니다. 부하 토크가 모터 토크를 초과하지 않는 한 컨트롤러는 캐리지 위치를 알 수 있습니다.
요약: 가변 릴럭턴스 스테퍼 모터
- 로터는 튀어나온 극이 있는 연철 원통형입니다.
- 이것은 가장 복잡하지 않고 가장 저렴한 스테퍼 모터입니다.
- 전원이 꺼진 모터 샤프트의 수동 회전에 디텐트 토크가 없는 유일한 유형의 스테퍼입니다.
- 큰 스텝 각도
- 리드 스크류는 종종 선형 스테핑 동작을 위해 샤프트에 장착됩니다.
영구 자석 스테퍼
영구 자석 스테퍼 모터는 원통형 영구 자석 로터를 가지고 있습니다. 스테이터는 일반적으로 두 개의 권선을 가지고 있습니다. 권선은 단극 구동 회로를 허용하기 위해 중앙 탭될 수 있으며, 여기서 자기장의 극성은 권선의 한쪽 끝에서 다른 쪽 끝으로 전압을 전환하여 변경됩니다.
센터 탭 없이 권선에 전원을 공급하려면 교대 극성의 바이폴라 드라이브 가 필요합니다. 순수한 영구 자석 스테퍼는 일반적으로 큰 스텝 각도를 갖습니다. 전원이 꺼진 모터의 샤프트 회전은 디텐트 토크를 나타냅니다. 디텐트 각도가 크면(예: 7.5 ° ~90 ° ) 하이브리드 스테퍼가 아니라 영구 자석 스테퍼일 가능성이 큽니다.
영구 자석 스테퍼 모터는 두 개(또는 그 이상)의 권선에 적용되는 위상 교류 전류가 필요합니다. 실제로 이는 거의 항상 솔리드 스테이트 전자 장치에 의해 DC에서 생성된 사각파입니다.
바이폴라 구동은 (+)와 (-) 극성 사이에서 번갈아가는 사각파로, 예를 들어 +2.5V에서 -2.5V까지입니다. 유니폴라 구동 은 중앙 탭 코일의 반대쪽 끝에 적용된 양의 사각파 쌍에서 개발된 코일에 (+)와 (-) 번갈아가는 자속을 공급합니다. 바이폴라 또는 유니폴라 파의 타이밍은 파동 구동, 풀 스텝 또는 하프 스텝입니다.
웨이브 드라이브

PM파 구동 시퀀스 (a) φ1+ , (b) φ2+ , (c) φ1- , (d) φ2-
개념적으로 가장 간단한 구동은 파동 구동 입니다 . 왼쪽에서 오른쪽으로 회전하는 순서는 양의 φ-1은 로터 북극을 위로, (+) φ-2는 로터 북쪽을 오른쪽으로, 음의 φ-1은 로터 북쪽을 아래로, (-) φ-2는 로터 왼쪽을 가리킵니다. 아래의 파동 구동 파형은 한 번에 하나의 코일만 전원이 공급됨을 보여줍니다. 간단하지만 다른 구동 기술만큼 토크를 많이 생성하지 않습니다.

파형: 양극파 구동
파형(위 그림)은 양극성인데, (+)와 (-) 두 극성이 모두 스테퍼를 구동하기 때문입니다. 코일 자기장은 구동 전류의 극성이 반전되기 때문에 반전됩니다.

파형: 단극파 구동
파형(위 그림)은 단극성인데, 단극성 하나만 필요하기 때문입니다. 이렇게 하면 구동 전자 장치가 간소화되지만 드라이버가 두 배 더 필요합니다. 중앙 탭 코일의 반대쪽 끝에 적용하여 교류 자기장을 생성하려면 (+)파 한 쌍이 필요하기 때문에 파형이 두 배 더 많습니다.
모터에는 교류 자기장이 필요합니다. 이는 단극 또는 양극 파동으로 생성될 수 있습니다. 그러나 모터 코일에는 단극 구동을 위한 센터 탭이 있어야 합니다.
영구 자석 스테퍼 모터는 다양한 리드선 구성으로 제조됩니다.

스테퍼 모터 배선도
- 4선 모터는 양극성 파형으로만 구동될 수 있습니다.
- 가장 일반적인 배열인 6선 모터는 센터 탭 때문에 단극 구동을 위해 고안되었습니다. 하지만 센터 탭을 무시하면 양극파로 구동될 수 있습니다.
- 5선 모터는 단극파로만 구동할 수 있는데, 두 권선에 동시에 전원이 공급되면 공통 중앙 탭이 간섭하기 때문입니다.
- 8선 구성은 드물지만 최대한의 유연성을 제공합니다. 6선 또는 5선 모터와 마찬가지로 단극 구동을 위해 배선될 수 있습니다. 코일 한 쌍을 직렬로 연결하여 고전압 바이폴라 저전류 구동을 하거나 병렬로 연결하여 저전압 고전류 구동을 할 수 있습니다.
바이 필라 와인딩 은 코일을 평행으로 두 개의 와이어, 종종 빨간색과 녹색 에나멜 와이어로 감아서 생산합니다. 이 방법은 중앙 탭 와인딩에 대해 정확히 1:1의 회전 비율을 생성합니다. 이 와인딩 방법은 위의 4와이어 배열을 제외한 모든 것에 적용할 수 있습니다.
풀 스텝 드라이브
풀 스텝 드라이브는 두 코일이 동시에 활성화되기 때문에 웨이브 드라이브보다 토크가 더 큽니다. 이는 두 필드 극 사이의 중간에서 로터 극을 끌어당깁니다. (아래 그림)

풀스텝, 바이폴라 드라이브
위에 표시된 바와 같이 풀 스텝 바이폴라 드라이브는 웨이브 드라이브와 동일한 스텝 각도를 갖습니다. 유니폴라 드라이브(표시되지 않음)는 센터 탭 와인딩의 끝에 적용된 위의 바이폴라 파형 각각에 대해 한 쌍의 유니폴라 파형이 필요합니다. 유니폴라 드라이브는 덜 복잡하고 저렴한 드라이버 회로를 사용합니다. 바이폴라 드라이브의 추가 비용은 더 많은 토크가 필요할 때 정당화됩니다.
하프 스텝 드라이브
주어진 스테퍼 모터 지오메트리의 스텝 각도는 반 스텝 드라이브로 절반으로 줄어듭니다. 이는 회전당 두 배의 스텝 펄스에 해당합니다. (아래 그림) 반 스텝은 모터 샤프트의 위치 결정에서 더 큰 분해능을 제공합니다.
예를 들어, 잉크젯 프린터의 용지 위로 프린트 헤드를 움직이는 모터의 속도를 반으로 줄이면 점의 밀도가 두 배가 됩니다.

하프 스텝, 바이폴라 드라이브
하프 스텝 구동은 웨이브 구동과 풀 스텝 구동을 조합한 것으로, 한 권선에 전원이 공급되고, 그 다음 두 권선에 전원이 공급되어 두 배의 스텝이 생성됩니다. 하프 스텝 구동의 단극 파형은 위에 나와 있습니다. 로터는 웨이브 구동의 경우와 같이 필드 극과 정렬되고, 풀 스텝 구동의 경우와 같이 극 사이에 정렬됩니다.
마이크로스테핑은 특수 컨트롤러로 가능합니다. 권선에 흐르는 전류를 사인파로 변화시키면 정상 위치 사이에 많은 마이크로 스텝을 보간할 수 있습니다. 영구 자석 스테퍼 모터의 구조는 위의 도면과 상당히 다릅니다.
더 작은 스텝 각도를 생성하기 위해 그림에 표시된 것보다 더 많은 극 수를 늘리는 것이 바람직합니다. 또한 권선 수를 줄이거나 적어도 제조의 용이성을 위해 권선 수를 늘리지 않는 것이 바람직합니다.
건설
영구 자석 스테퍼 모터의 구조는 위의 도면과 상당히 다릅니다. 더 작은 스텝 각도를 생성하기 위해 그림에 표시된 것보다 더 많은 극 수를 늘리는 것이 바람직합니다. 또한 권선 수를 줄이거나 적어도 제조의 용이성을 위해 권선 수를 늘리지 않는 것이 바람직합니다.

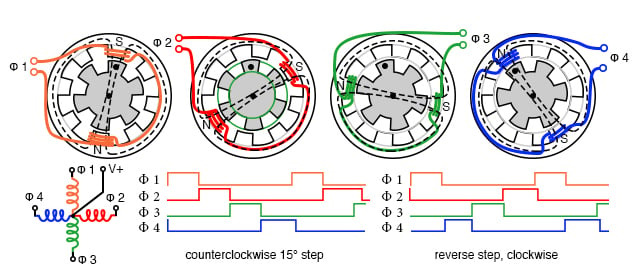
영구자석 스테퍼 모터, 24극 캔스택 구조
영구 자석 스테퍼는 권선이 두 개뿐이지만 두 위상 각각에 24극이 있습니다. 이러한 구조 스타일은 캔 스택 이라고 합니다 . 위상 권선은 연강 쉘로 감싸고, 핑거는 중앙으로 가져옵니다.
한 단계는 일시적으로 북쪽과 남쪽을 갖게 됩니다. 각 면은 도넛 중앙을 감싸며 12개의 서로 맞물린 핑거로 총 24개의 극이 됩니다. 이 번갈아가는 북쪽-남쪽 핑거는 영구 자석 로터를 끌어당깁니다.
위상의 극성이 반전되면 로터는 360 ° /24=15 ° 점프합니다 . 어느 방향인지 알 수 없으므로 유용하지 않습니다. 그러나 φ-1에 전원을 공급한 다음 φ-2에 전원을 공급하면 φ-2가 φ-1에서 7.5 ° 오프셋(회전)되어 로터가 7.5 ° 이동합니다 . 오프셋은 아래를 참조하세요. 그리고 위상이 번갈아 가며 회전하면 재현 가능한 방향으로 회전합니다.
위의 파형 중 하나를 적용하면 영구 자석 회전자가 회전합니다.
로터는 표시된 24극 패턴으로 자화된 회색 페라이트 세라믹 실린더입니다. 이것은 자석 뷰어 필름이나 종이 포장에 적용된 철분 가루로 볼 수 있습니다. 그러나 필름을 사용하면 북극과 남극 모두 녹색이 됩니다.

(a) 캔 스택의 외부 모습, (b) 필드 오프셋 세부 사항
PM 스테퍼의 캔 스택 스타일 구조는 독특하고 스택된 "캔"(위 그림)으로 쉽게 식별할 수 있습니다. 2상 섹션 사이의 회전 오프셋에 주목하세요. 이것은 로터가 2상 사이의 필드 전환을 따르도록 하는 데 중요합니다.
요약: 영구 자석 스테퍼 모터
- 회전자는 영구 자석이며, 종종 여러 개의 극으로 자화된 페라이트 슬리브입니다.
- 캔-스택 구조는 부드러운 철로 된 핑거가 서로 엇갈려 있는 단일 코일에서 여러 개의 극을 제공합니다.
- 큰 것에서 중간 정도의 스텝 각도.
- 종종 컴퓨터 프린터에서 용지를 인쇄하는 데 사용됩니다.
하이브리드 스테퍼 모터
하이브리드 스테퍼 모터는 가변 릴럭턴스 스테퍼와 영구 자석 스테퍼의 특징을 결합하여 더 작은 스텝 각도를 생성합니다. 로터는 원통형 영구 자석으로, 방사형 연철 이빨로 축을 따라 자화됩니다.
스테이터 코일은 해당 이빨이 있는 교대로 된 극에 감겨 있습니다. 일반적으로 극 쌍 사이에 두 개의 권선 위상이 분산되어 있습니다. 이 권선은 단극 구동을 위해 중앙 탭될 수 있습니다. 중앙 탭은 바이 필라 권선 , 즉 물리적으로 병렬로 감긴 한 쌍의 와이어로 이루어졌지만 직렬로 배선되어 있습니다.
위상 구동 전류가 반전되면 위상의 남북 극이 극성을 바꿉니다. 바이폴라 구동은 탭되지 않은 권선에 필요합니다.

하이브리드 스테퍼 모터
한 로터 섹션의 48개 이빨은 다른 부분에서 반 피치만큼 오프셋되어 있습니다. (위의 로터 폴 세부 정보 참조. 이 로터 이빨 오프셋은 아래에도 나와 있습니다.) 이 오프셋으로 인해 로터는 효과적으로 반대 극성의 96개 교차된 폴을 갖습니다.
이 오프셋은 한 위상의 필드 극성을 반전하여 1/96 회전 단계로 회전할 수 있게 합니다. 위와 아래에 표시된 것처럼 2상 권선이 일반적입니다. 하지만 최대 5개의 위상이 있을 수 있습니다.
8극의 스테이터 이는 극 사이의 공간에 없는 이를 제외하고 48개 로터 이에 해당합니다. 따라서 로터의 한 극, 예를 들어 남극은 48개의 다른 위치에서 스테이터와 정렬될 수 있습니다. 그러나 남극의 이는 북쪽 이에서 반 이만큼 오프셋되어 있습니다.
따라서 로터는 96개의 다른 위치에서 스테이터와 정렬될 수 있습니다. 이 반 이빨 오프셋은 위의 로터 폴 세부 사항이나 아래 그림에 나와 있습니다.
이것이 충분히 복잡하지 않은 것처럼, 스테이터 메인 폴은 두 개의 위상(φ-1, φ-2)으로 나뉩니다. 이러한 스테이터 위상은 서로 1/4의 이빨만큼 오프셋되어 있습니다. 이 세부 사항은 아래의 회로도에서만 식별할 수 있습니다. 결과적으로 위상이 교대로 전원이 공급되면 로터가 1/4의 이빨 단위로 이동합니다.
즉, 위 스테퍼의 경우 로터는 1회전당 2×96=192단계로 이동합니다.
위의 그림은 실제 하이브리드 스테퍼 모터를 대표합니다. 그러나 위에서 명확하지 않은 세부 사항을 설명하기 위해 단순화된 그림과 개략적 표현을 제공합니다. 단순화를 위해 로터와 스테이터의 코일과 이빨 수가 줄어든 것을 주목하세요.
다음 두 그림에서 우리는 1/4 이빨 오프셋된 두 스테이터 위상에 의해 생성된 1/4 이빨 회전과 로터 반 이빨 오프셋을 설명하려고 시도합니다. 구동 전류 타이밍과 함께 1/4 이빨 스테이터 오프셋은 회전 방향도 정의합니다.

하이브리드 스테퍼 모터 회로도
하이브리드 스테퍼 회로도의 특징
- 영구 자석 회전자의 윗부분은 남극이고, 아랫부분은 북극입니다.
- 로터의 남북 이빨은 이빨의 절반만큼 오프셋되어 있습니다.
- φ-1 스테이터에 일시적으로 전원이 공급되면 북쪽 상단, 남쪽 하단입니다.
- 위쪽 φ-1 고정자 이는 북쪽과 로터 위쪽 남쪽 이에 정렬됩니다.
- 하단 φ-1' 스테이터 이는 남쪽으로 로터 하단 북쪽 이에 정렬됩니다.
- 홀드인 토크를 극복할 만큼 샤프트에 충분한 토크가 가해지면 로터가 한 개의 이빨만큼 움직입니다.
- φ-1의 극성이 반전되면 로터는 반 이빨만큼 움직이며 방향은 알 수 없습니다. 정렬은 남쪽 스테이터 상단에서 북쪽 로터 하단으로, 북쪽 스테이터 하단에서 남쪽 로터로 됩니다.
- φ-1에 전원이 공급되면 φ-2 스테이터 이빨은 로터 이빨과 정렬되지 않습니다. 사실, φ-2 스테이터 이빨은 1/4 이빨만큼 오프셋됩니다. 이렇게 하면 φ-1에 전원이 공급되지 않고 φ-2에 전원이 공급되면 그 양만큼 회전할 수 있습니다. φ-1과 드라이브의 극성은 회전 방향을 결정합니다.

하이브리드 스테퍼 모터 회전 순서
하이브리드 스테퍼 모터 회전
- 로터 상단은 영구 자석 남쪽, 하단은 북쪽입니다. 필드 φ1, φ-2는 켜짐, 꺼짐, 역방향으로 전환 가능합니다.
- (a) φ-1=on=north-top, φ-2=off. 정렬(위에서 아래로): φ-1 스테이터-N:로터-top-S, φ-1' 스테이터-S:로터-bottom-N. 시작 위치, 회전=0.
- (b) φ-1=꺼짐, φ-2=켜짐. 정렬(오른쪽에서 왼쪽): φ-2 스테이터-N-오른쪽: 로터-위쪽-S, φ-2' 스테이터-S: 로터-아래쪽-N. 1/4 이빨 회전, 전체 회전=1/4 이빨.
- (c) φ-1=역방향(켜짐), φ-2=꺼짐. 정렬(아래에서 위로): φ-1 스테이터-S:로터-아래-N, φ-1' 스테이터-N:로터-위-S. 마지막 위치에서 1/4 이빨을 회전합니다. 시작점에서 총 회전: 1/2 이빨.
- 표시되지 않음: φ-1=off, φ-2=reverse(on). 정렬(좌우): 전체 회전: 3/4 치아.
- 표시되지 않음: φ-1=켜짐, φ-2=꺼짐(a와 동일). 정렬(위에서 아래로): 전체 회전 1-이빨.
디텐트 토크가 있는 무동력 스테퍼 모터는 영구 자석 스테퍼 또는 하이브리드 스테퍼입니다. 하이브리드 스테퍼는 영구 자석 스테퍼의 7.5 ° 보다 훨씬 작은 작은 스텝 각도를 갖습니다 . 스텝 각도는 회전당 수백 개의 스텝에 해당하는 1도의 일부일 수 있습니다. 요약: 하이브리드 스테퍼 모터
- 스텝 각도는 가변 릴럭턴스나 영구 자석 스테퍼보다 작습니다.
- 로터는 미세한 이빨을 가진 영구 자석입니다. 북쪽과 남쪽 이빨은 더 작은 스텝 각도를 위해 반 이빨로 오프셋되어 있습니다.
- 고정자 극에는 회전자와 동일한 피치의 미세한 이빨이 맞춰져 있습니다.
- 고정자 권선은 적어도 두 개의 상으로 나뉩니다.
- 하나의 고정자 권선의 극은 1/4 이빨만큼 오프셋되어 있어 더 작은 스텝 각도를 제공합니다.