무브러시 DC 모터는 솔리드 스테이트 전력 반도체 의 가용성을 통해 기존의 브러시 DC 모터에서 개발되었습니다 . 그렇다면 왜 AC 모터에 대한 장에서 무브러시 DC 모터를 논의할까요?
무브러시 DC 모터는 AC 동기 모터와 유사합니다. 가장 큰 차이점은 동기 모터가 무브러시 DC 모터의 직사각형 또는 사다리꼴 역기전력과 달리 사인파 역기전력을 발생시킨다는 것입니다.
두 제품 모두 고정자가 회전 자기장을 생성하여 자기 회전자에서 토크를 생성합니다.
동기 모터는 일반적으로 대형 멀티킬로와트 크기이며, 종종 전자석 로터가 있습니다. 진정한 동기 모터는 단일 속도로 간주되며, 전력선 주파수의 약수입니다. 무브러시 DC 모터는 일반적으로 소형입니다. 수 와트에서 수십 와트이며, 영구 자석 로터가 있습니다.
무브러시 DC 모터의 속도는 기준 주파수에 종속된 위상 잠금 루프에 의해 구동되지 않는 한 고정되지 않습니다. 구조 스타일은 원통형 또는 팬케이크형입니다.
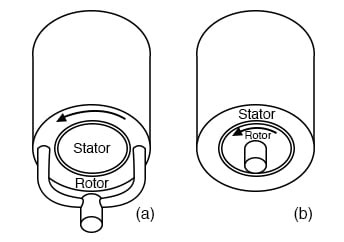
원통형 구조: (a) 외부 로터, (b) 내부 로터
가장 일반적인 구조인 원통형은 두 가지 형태를 취할 수 있습니다(위 그림). 가장 일반적인 원통형 스타일은 오른쪽 위에 있는 안쪽에 회전자가 있는 것입니다. 이 스타일의 모터는 하드 디스크 드라이브에 사용됩니다. 또한 고정자를 둘러싼 바깥쪽에 회전자를 배치할 수도 있습니다.
이는 샤프트가 없는 무브러시 DC 팬 모터의 경우입니다. 이러한 스타일의 구조는 짧고 튼튼할 수 있습니다. 그러나 자속의 방향은 회전 축에 대해 방사형입니다.
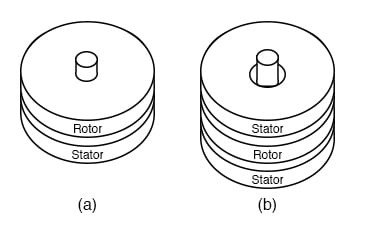
팬케이크 모터 구조: (a) 단일 스테이터, (b) 이중 스테이터
고토크 팬케이크 모터는 회전자 양쪽에 스테이터 코일이 있는 경우가 있습니다(위 그림-b).
플로피 디스크 드라이브 모터와 같은 저토크 애플리케이션은 로터 한쪽에 스테이터 코일이 있으면 충분합니다(위의 그림-a). 자속의 방향은 축 방향, 즉 회전 축과 평행합니다.
정류 기능은 다양한 샤프트 위치 센서, 즉 광학 인코더, 자기 인코더(리졸버, 싱크로 등), 또는 홀 효과 자기 센서에 의해 수행될 수 있습니다. 작고 저렴한 모터는 홀 효과 센서를 사용합니다.
홀 효과 센서는 전자 흐름이 전류 흐름 방향에 수직인 자기장의 영향을 받는 반도체 소자입니다. 4단자 가변 저항 네트워크처럼 보입니다. 두 출력의 전압은 보완적입니다.
센서에 자기장을 적용하면 출력에서 작은 전압 변화가 발생합니다. 홀 출력은 전력 장치에 더 안정적인 구동을 제공하기 위해 비교기를 구동할 수 있습니다. 또는 적절하게 바이어스된 경우 복합 트랜지스터 단계를 구동할 수 있습니다.
더욱 현대적인 홀 효과 센서에는 통합 증폭기와 디지털 회로가 포함될 수 있습니다. 이 3-리드 장치는 위상 권선을 공급하는 전력 트랜지스터를 직접 구동할 수 있습니다. 센서는 위치를 감지하기 위해 영구 자석 로터에 가깝게 장착해야 합니다.

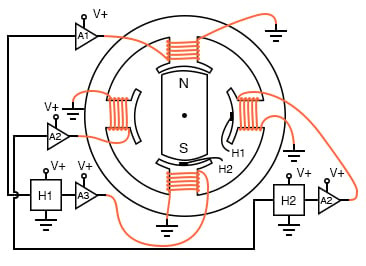
홀 효과 센서는 3-φ 무브러시 DC 모터를 정류합니다.
간단한 원통형 3-φ 모터(위 그림)는 3개의 스테이터 위상 각각에 대해 홀 효과 장치에 의해 정류됩니다. 영구 자석 로터의 변화하는 위치는 통과하는 로터 극의 극성이 변함에 따라 홀 장치에 의해 감지됩니다.
이 홀 신호는 스테이터 코일이 적절한 전류로 구동되도록 증폭됩니다. 여기서는 표시되지 않았지만, 홀 신호는 보다 효율적인 구동 파형을 위해 조합 논리로 처리될 수 있습니다.
위의 원통형 모터는 일정한 속도를 유지하기 위해 위상 잠금 루프(PLL)가 장착된 경우 하드 드라이브를 구동할 수 있습니다. 유사한 회로는 팬케이크 플로피 디스크 드라이브 모터(아래 그림)를 구동할 수 있습니다. 다시 말하지만, 일정한 속도를 유지하려면 PLL이 필요합니다.

무브러시 팬케이크 모터
3-φ 팬케이크 모터는 6개의 스테이터 극과 8개의 로터 극을 가지고 있습니다. 로터는 축 방향으로 자화된 8개의 교대 극으로 자화된 평평한 페라이트 링입니다. 로터가 스테이터 중앙의 베어링에 장착하기 위해 연강판으로 덮여 있다는 것을 보여주지 않습니다.
강철판은 또한 자기 회로를 완성하는 데 도움이 됩니다. 스테이터 극은 또한 강철판 위에 장착되어 자기 회로를 닫는 데 도움이 됩니다.
평평한 스테이터 코일은 코일에 더 잘 맞고 로터 극에 근접하도록 사다리꼴 모양입니다. 6스테이터 코일은 3개의 권선 단계로 구성됩니다.
3개의 고정자 상에 연속적으로 에너지가 공급되면 회전 자기장이 생성됩니다.
영구 자석 로터는 동기 모터의 경우와 같이 따라갈 것입니다. 2극 로터는 회전하는 필드와 동일한 회전 속도로 이 필드를 따라갈 것입니다. 그러나 8극 로터는 로터에 추가 극이 있기 때문에 이 속도의 약수로 회전할 것입니다.
무브러시 DC 팬 모터는 다음과 같은 특징을 가지고 있습니다:

무브러시 팬 모터, 2-φ
- 고정자는 4극 사이에 분산된 2상을 갖습니다.
- 4개의 돌출극에는 권선이 없어 토크가 발생하지 않는 지점이 없습니다.
- 로터에는 4개의 주요 구동극이 있습니다.
- 로터에는 8개의 극이 중첩되어 있어 토크가 0인 지점을 제거하는 데 도움이 됩니다.
- 홀 효과 센서는 물리적으로 45도 간격으로 배치됩니다.
- 팬 하우징은 스테이터 위에 놓인 로터 위에 배치됩니다.
무브러시 팬 모터의 목표는 제조 비용을 최소화하는 것입니다. 이는 성능이 낮은 제품을 3-φ에서 2-φ 구성으로 옮기는 인센티브입니다. 구동 방식에 따라 4-φ 모터라고 불릴 수 있습니다.
기존의 DC 모터는 자체 시동을 하려면 짝수의 전기자 극(2, 4 등)을 가질 수 없다는 것을 기억하실 겁니다. 3, 5, 7이 일반적입니다. 따라서 가상의 4극 모터가 토크 최소값에서 정지하여 정지 상태에서 시동할 수 없는 경우가 있습니다.
권선이 없는 4개의 작은 돌출 극을 추가하면 토크 대 위치 곡선에 리플 토크가 중첩됩니다. 이 리플 토크를 정상적인 전원 토크 곡선에 추가하면 토크 최소값이 부분적으로 제거됩니다.
이를 통해 모든 가능한 정지 위치에서 모터를 시동할 수 있습니다. 일반적인 4극 영구 자석 로터에 8개의 영구 자석 극을 추가하면 일반적인 4극 리플 토크에 작은 2차 고조파 리플 토크가 중첩됩니다.
이렇게 하면 토크 최소값이 더 제거됩니다. 토크 최소값이 0으로 떨어지지 않는 한 모터를 시동할 수 있어야 합니다. 토크 최소값을 제거하는 데 성공할수록 모터 시동이 더 쉬워집니다.
2-φ 스테이터는 홀 센서가 90 ° 전기적 으로 떨어져 있어야 합니다 . 로터가 2극 로터인 경우 홀 센서는 90 ° 물리적으로 배치됩니다. 4극 영구 자석 로터가 있으므로 센서는 90 ° 전기적 간격을 달성하기 위해 45 ° 물리적으로 배치해야 합니다 . (위의 홀 간격 참고)
대부분의 토크는 내부 스테이터 2-φ 코일과 로터의 4극 섹션의 상호 작용으로 인해 발생합니다. 또한, 홀 센서가 적절한 정류 신호를 감지할 수 있도록 로터의 4극 섹션이 바닥에 있어야 합니다.
8극 로터 섹션은 모터 시동 개선에만 사용됩니다.
무브러시 DC 모터 2-φ 푸시풀 구동
위 그림에서 2-φ 푸시풀 드라이브(4-φ 드라이브라고도 함)는 두 개의 홀 효과 센서를 사용하여 네 개의 권선을 구동합니다. 센서는 전기적으로 90 ° 떨어져 있으며 , 이는 단일 극 로터의 경우 물리적으로 90 ° 떨어져 있습니다 .
홀 센서는 두 개의 보완 출력을 가지고 있으므로, 하나의 센서가 두 개의 반대 권선에 대한 정류를 제공합니다.