대부분의 AC 모터는 유도 모터입니다. 유도 모터는 견고성과 단순성으로 인해 선호됩니다. 사실, 산업용 모터의 90%가 유도 모터입니다.
니콜라 테슬라는 1883년에 다상 유도 전동기의 기본 원리를 고안했고 1888년에는 반마력(400와트) 모델을 출시했습니다. 테슬라는 제조권을 조지 웨스팅하우스에게 65,000달러에 매각했습니다.
대부분의 대형( > 1 hp 또는 1 kW) 산업용 모터는 다상 유도 모터 입니다 . 다상이란 스테이터가 모터 극당 여러 개의 개별 권선을 포함하고 해당 시간 이동 사인파에 의해 구동된다는 것을 의미합니다.
실제로는 2상 또는 3상입니다. 대형 산업용 모터는 3상입니다. 단순화를 위해 2상 모터의 여러 그림을 포함했지만, 거의 모든 다상 모터가 3상이라는 점을 강조해야 합니다.
유도 전동기 란 브러시 DC 정류자 전동기와 달리 고정자 권선이 변압기와 같이 회전자 도체에 전류 흐름을 유도한다는 것을 의미합니다.
AC 유도 모터 구조
유도 모터는 전기자라고 알려진 회전자와 아래 그림과 같이 다상 에너지원에 연결된 권선이 포함된 고정자로 구성됩니다. 아래의 간단한 2상 유도 모터는 니콜라 테슬라가 1888년에 도입한 1/2마력 모터와 유사합니다.

테슬라 다상 유도 전동기
위 그림의 스테이터는 사용 가능한 전기 에너지의 위상에 해당하는 코일 쌍으로 감겨 있습니다. 위의 2상 유도 모터 스테이터는 2쌍의 코일을 가지고 있으며, AC의 두 위상 각각에 대해 한 쌍씩 있습니다.
한 쌍의 개별 코일은 직렬로 연결되고 전자석의 반대 극에 해당합니다. 즉, 한 코일은 N극에 해당하고 다른 코일은 AC 위상이 극성을 변경할 때까지 S극에 해당합니다. 다른 코일 쌍은 공간에서 첫 번째 쌍에 대해 90°로 배향됩니다.
이 코일 쌍은 2상 모터의 경우 시간적으로 90°만큼 이동된 AC에 연결됩니다. 테슬라 시대에 AC의 두 상의 소스는 2상 교류 발전기였습니다.
위 그림의 스테이터는 테슬라의 초기 유도 모터에 사용된 것처럼 튀어나온 , 뚜렷한 돌출 극을 가지고 있습니다. 이 설계는 오늘날에도 분수 마력 모터(<50와트)에 사용됩니다. 그러나 더 큰 모터의 경우 코일을 스테이터 적층에 자른 슬롯에 내장하면 토크 맥동이 적고 효율이 더 높아집니다(아래 그림).

와인딩을 위한 슬롯을 보여주는 스테이터 프레임
스테이터 적층은 전기 등급 강철 시트에서 펀칭된 슬롯이 있는 얇은 절연 링입니다. 이것들의 스택은 엔드 나사로 고정되며, 엔드 하우징을 고정할 수도 있습니다.

(a) 2-φ 및 (b) 3-φ 권선이 있는 고정자
위 그림에서 2상 모터와 3상 모터의 권선은 모두 스테이터 슬롯에 설치되었습니다. 코일은 외부 고정물에 감긴 다음 슬롯에 삽입됩니다. 코일 주변부와 슬롯 사이에 끼운 절연은 마모로부터 보호합니다.
실제 스테이터 권선은 위 그림의 극당 단일 권선보다 더 복잡합니다. 2-φ 모터를 돌출 극이 있는 테슬라의 2-φ 모터와 비교하면 코일 수는 같습니다. 실제 대형 모터에서는 극 권선이 위보다 많은 작은 슬롯에 삽입된 동일한 코일로 나뉩니다.
이 그룹을 위상 벨트 라고 합니다 (아래 그림 참조). 위상 벨트의 분산 코일은 일부 홀수 고조파를 취소하여 극 전체에 걸쳐 더 사인파적 자기장 분포를 생성합니다. 이는 동기 모터 섹션 에 나와 있습니다 .
극 가장자리의 슬롯은 다른 슬롯보다 회전 수가 적을 수 있습니다. 가장자리 슬롯에는 두 위상의 권선이 포함될 수 있습니다. 즉, 위상 벨트가 겹칩니다.

AC 유도 모터의 인기의 핵심은 간단한 로터(아래 그림)에서 알 수 있듯이 단순성입니다. 로터는 샤프트, 강철 적층 로터, 그리고 (b)에 표시된 로터에서 제거된 내장형 구리 또는 알루미늄 스쿼럴 케이지 로 구성됩니다 .
DC 모터 전기자와 비교했을 때, 정류자가 없습니다. 이는 브러시, 아크, 스파크, 흑연 먼지, 브러시 조정 및 교체, 정류자의 재가공을 제거합니다.

(a) 내장된 다람쥐 케이지, (b) 로터에서 제거된 전도성 케이지가 있는 적층 로터
다람쥐 케이지 도체는 샤프트에 대해 비뚤어지거나 꼬일 수 있습니다. 스테이터 슬롯과의 정렬 불량은 토크 맥동을 줄입니다.
로터와 스테이터 코어는 모두 절연된 적층판의 스택으로 구성됩니다. 적층판은 와전류 손실을 최소화하기 위해 절연 산화물 또는 바니시로 코팅됩니다. 적층판에 사용된 합금은 낮은 히스테리시스 손실을 위해 선택됩니다.
유도 전동기의 동작 이론
작동 원리를 간단히 설명하면, 고정자는 회전 자기장을 생성하여 회전자를 끌어당긴다는 것입니다.
유도 모터의 작동 이론은 회전 자기장에 기초합니다. 회전 자기장을 만드는 한 가지 방법은 영구 자석을 회전시키는 것입니다. 움직이는 자속의 자기선이 전도 디스크를 자르면 자석의 움직임을 따릅니다.
도체를 절단하는 플럭스 라인은 도체 디스크에서 전압과 그에 따른 전류 흐름을 유도합니다. 이 전류 흐름은 영구 자석의 움직임에 반대되는 극성을 가진 전자석을 생성합니다 . 렌츠의 법칙입니다 .
전자석의 극성은 영구 자석을 끌어당기는 것입니다. 디스크는 영구 자석보다 약간 느린 속도로 따라갑니다.

회전 자기장은 전도성 디스크에서 토크를 생성합니다.
디스크에 의해 발생하는 토크는 디스크를 절단하는 플럭스 라인의 수와 디스크를 절단하는 속도에 비례합니다. 디스크가 영구 자석과 같은 속도로 회전한다면 디스크를 절단하는 플럭스도 없고, 유도 전류 흐름도 없고, 전자기장도 없고, 토크도 없습니다.
따라서 디스크의 속도는 항상 회전하는 영구 자석의 속도보다 뒤처지게 되므로, 디스크를 자르는 자속선이 전류를 유도하고, 디스크 내에 전자기장을 생성하며, 이 전자기장은 영구 자석을 따라갑니다.
디스크에 부하가 가해져 속도가 느려지면 디스크를 절단하는 플럭스 라인이 더 많아지면서 토크가 더 많이 발생합니다. 토크는 슬립 에 비례합니다 . 슬립은 디스크가 회전하는 자석 뒤에 떨어지는 정도입니다. 슬립이 많을수록 전도성 디스크를 절단하는 플럭스가 더 많아져 토크가 더 많이 발생합니다.
아날로그 자동차 와전류 속도계는 위에 설명된 원리를 기반으로 합니다. 디스크가 스프링으로 고정되어 있으므로 디스크와 바늘의 처짐은 자석 회전 속도에 비례합니다.
회전 자기장은 서로 직각으로 배치된 두 개의 코일에 의해 생성되며, 위상이 90° 벗어난 전류에 의해 구동됩니다. 오실로스코프 리사주 패턴에 익숙하다면 이는 놀라운 일이 아닐 것입니다.

위상이 다른(90°) 사인파는 원형 리사주 패턴을 생성합니다.
위 그림에서 원형 리사주는 수평 및 수직 오실로스코프 입력을 90° 위상차 사인파로 구동하여 생성됩니다. 최대 "X" 및 최소 "Y" 편향으로 (a)에서 시작하여 트레이스는 (b)를 향해 위로 왼쪽으로 이동합니다.
(a)와 (b) 사이에서 두 파형은 45°에서 0.707 Vpk와 같습니다. 이 지점(0.707, 0.707)은 (a)와 (b) 사이의 원의 반지름에 있습니다. 트레이스는 최소 "X" 및 최대 "Y" 편향으로 (b)로 이동합니다. 최대 음의 "X" 및 최소 "Y" 편향으로 트레이스는 (c)로 이동합니다.
그런 다음 최소 "X"와 최대 음수 "Y"로 (d)로 이동하고 다시 (a)로 돌아와 한 사이클을 완료합니다.

X축 사인 및 Y축 코사인 추적 원
그림은 공간에서 직각인 오실로스코프 편향판에 적용된 두 개의 90° 위상 편이 사인파를 보여줍니다. 90° 위상 사인파와 직각 편향의 조합은 2차원 패턴인 원을 생성합니다. 이 원은 반시계 방향으로 회전하는 전자 빔에 의해 추적됩니다.
참고로, 아래 그림은 동상 사인파가 원형 패턴을 생성하지 않는 이유를 보여줍니다. 동일한 "X" 및 "Y" 편향은 조명된 스팟을 (a)의 원점에서 (b)의 오른쪽(1,1)으로 이동시키고, 다시 왼쪽 아래로 (c)의 원점으로 이동시키고, (d)의 왼쪽 아래로 (-1.-1)로 이동시키고, 다시 원점으로 수직으로 이동합니다. 선은 두 축을 따라 동일한 편향으로 생성됩니다. y=x는 직선입니다.

동상파형에서 원형운동이 없음
90° 위상이 다른 사인파 한 쌍이 원형 리사주를 생성하면, 유사한 전류 한 쌍은 원형 회전 자기장을 생성할 수 있어야 합니다. 이는 2상 모터의 경우입니다. 유추적으로 공간에 120° 간격으로 배치된 세 개의 권선에 해당하는 120° 위상 전류를 공급하면 회전 자기장도 생성됩니다.
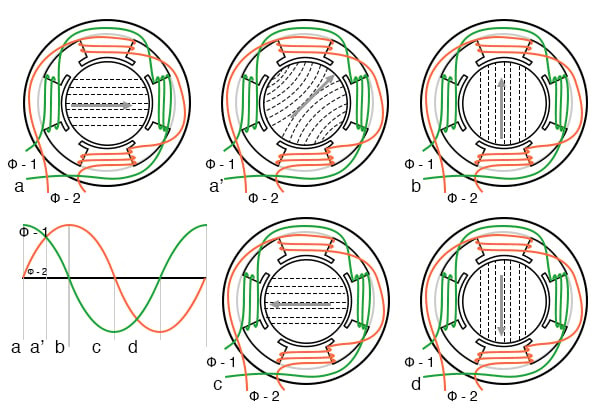
90° 위상 사인파에서 회전하는 자기장
위 그림과 같이 90° 위상 사인파가 지점 (a)에서 (d)까지 진행됨에 따라 자기장은 다음과 같이 시계 반대 방향으로 회전합니다(그림 ad).
- (a) φ-1 최대값, φ-2 0
- (a') φ-1 70%, φ-2 70%
- (b) φ-1 0, φ-2 최대
- (c) φ-1 최대 음수, φ-2 0
- (d) Φ-1 제로, Φ-2 최대 네거티브
전체 모터 속도 및 동기 모터 속도
스테이터 회전 자기장의 회전 속도는 스테이터 위상당 극 쌍의 수와 관련이 있습니다. 아래의 "풀 스피드" 수치는 총 6개의 극 또는 3개의 극 쌍과 3개의 위상을 갖습니다. 그러나 위상당 극 쌍은 단 하나뿐입니다.
자기장은 사인파 주기당 한 번씩 회전합니다. 60Hz 전력의 경우 자기장은 초당 60회 또는 분당 3600회 회전합니다(rpm). 50Hz 전력의 경우 초당 50회 또는 분당 3000회 회전합니다. 3600 및 3000 rpm은 모터의 동기 속도 입니다.
유도 전동기의 회전자는 이 속도에 도달하지 못하지만, 확실히 상한선입니다. 모터 극 수를 두 배로 늘리면 동기 속도가 절반으로 줄어듭니다. 자기장이 전기 사인파의 360° 동안 공간에서 180° 회전하기 때문입니다.

고정자 극을 두 배로 늘리면 동기 속도가 절반으로 줄어듭니다.
동기 속도는 다음과 같습니다.
N s = 120·f/PN s = 동기 속도(rpm) f = 인가 전력의 주파수(Hz) P = 위상당 극의 총 수(2의 배수)예: 위의 "반속도" 그림은 위상당 4개의 극을 갖습니다(3상). 50Hz 전력의 동기 속도는 다음과 같습니다. S = 120·50/4 = 1500rpm
유도 전동기에 대한 간단한 설명은 고정자에서 생성된 회전 자기장이 회전자를 함께 끌어당긴다는 것입니다.
더 길고 더 정확한 설명은 고정자의 자기장이 회전자 스쿼럴 케이지 도체로 교류 전류를 유도하여 변압기 2차측을 구성한다는 것입니다. 이 유도된 회전자 전류는 차례로 자기장을 생성합니다.
회전하는 스테이터 자기장은 이 로터 자기장과 상호 작용합니다. 로터 자기장은 회전하는 스테이터 자기장과 정렬하려고 시도합니다. 그 결과 스쿼럴 케이지 로터가 회전합니다. 기계적 모터 토크 부하, 베어링, 편류 또는 기타 손실이 없다면 로터는 동기 속도로 회전할 것입니다.
그러나 로터와 동기 속도 스테이터 필드 사이의 슬립은 토크를 발생시킵니다. 슬립할 때 로터 도체를 절단하는 자속이 토크를 발생시킵니다. 따라서 부하가 걸린 모터는 기계적 부하에 비례하여 슬립합니다.
회전자가 동기 속도로 작동한다면 고정자 플럭스에 의한 회전자 절단이 없고, 회전자에 전류가 유도되지 않으며, 토크도 발생하지 않습니다.
유도 전동기의 토크
모터에 처음 전원을 공급하면 회전자는 정지 상태이고 고정자 자기장은 동기 속도 N s 로 회전합니다. 고정자 자기장은 동기 속도 N s 로 회전자를 절단합니다 . 회전자 단락 턴에서 유도되는 전류는 최대이고 전류의 주파수, 즉 라인 주파수도 최대입니다.
로터가 빨라질 때, 스테이터 플럭스가 로터를 절단하는 속도는 동기 속도 N s 와 실제 로터 속도 N의 차이, 즉 (N s - N)입니다. 로터를 절단하는 실제 플럭스의 동기 속도에 대한 비율은 슬립 으로 정의됩니다 .
s = (N s - N)/N s 여기서: N s = 동기 속도, N = 회전자 속도
로터 도체에 유도된 전류의 주파수는 모터 시작 시 라인 주파수만큼 높을 뿐이며 로터가 동기 속도에 접근함에 따라 감소합니다. 로터 주파수는 다음과 같습니다.
f r = s·f 여기서: s = 슬립, f = 고정자 전력선 주파수
100% 토크에서의 슬립은 일반적으로 유도 모터에서 5% 이하입니다. 따라서 f = 50Hz 라인 주파수의 경우 로터의 유도 전류 주파수 fr = 0.05·50 = 2.5Hz입니다. 왜 이렇게 낮을까요? 스테이터 자기장은 50Hz로 회전합니다. 로터 속도는 5% 낮습니다.
회전 자기장은 2.5Hz에서만 로터를 절단합니다. 2.5Hz는 동기 속도와 실제 로터 속도의 차이입니다. 로터가 동기 속도에서 조금 더 빨리 회전하면 플럭스가 로터를 전혀 절단하지 않습니다. f r = 0.

토크 및 속도 vs %Slip. %N s =%동기 속도
위의 그래프는 잠금 로터 토크 (LRT)로 알려진 시작 토크가 안전한 연속 토크 정격인 전체 부하 토크 (FLT) 의 100%보다 높다는 것을 보여줍니다 . 잠금 로터 토크는 위에 그래프로 표시된 예시 모터의 경우 FLT의 약 175%입니다.
잠긴 로터 전류 (LRC) 로 알려진 시작 전류는 안전 주행 전류인 전부하 전류 (FLC) 의 500%입니다 . 전류가 높은 이유는 변압기의 단락된 2차와 유사하기 때문입니다. 로터가 회전하기 시작하면 토크가 특정 모터 클래스에서 약간 감소하여 풀업 토크 라고 알려진 값이 될 수 있습니다 .
이것은 시동 모터가 경험한 가장 낮은 토크 값입니다. 로터가 동기 속도의 80%를 얻으면 토크는 전체 부하 토크의 175%에서 300%까지 증가합니다. 이 고장 토크는 정상보다 큰 20% 슬립 때문입니다.
이 지점에서 전류는 약간만 감소했지만 이 지점을 지나면 빠르게 감소합니다. 로터가 동기 속도의 몇 퍼센트 이내로 가속함에 따라 토크와 전류가 모두 상당히 감소합니다. 정상 작동 중에는 슬립이 몇 퍼센트에 불과합니다.
작동 중인 모터의 경우, 토크 곡선의 100% 정격 토크 미만은 정상입니다. 모터 부하는 토크 곡선의 작동 지점을 결정합니다. 모터 토크와 전류는 시동 중 몇 초 동안 100%를 초과할 수 있지만, 100% 이상의 연속 작동은 모터를 손상시킬 수 있습니다.
고장 토크를 초과하는 모터 토크 부하가 있으면 모터가 정지합니다. 토크, 슬립 및 전류는 "기계적 토크 없음" 부하 조건에서 0에 가까워집니다. 이 조건은 개방형 2차 변압기와 유사합니다.
위의 토크 곡선과 상당한 차이를 보이는 몇 가지 기본 유도 모터 설계가 있습니다. 다양한 설계는 다양한 유형의 부하를 시동하고 작동하도록 최적화되었습니다. 다양한 모터 설계 및 크기에 대한 잠금 로터 토크(LRT)는 전체 부하 토크(FLT)의 60%에서 350%까지입니다.
시동 전류 또는 잠긴 로터 전류(LRC)는 전체 부하 전류(FLC)의 500%에서 1400%까지 다양할 수 있습니다. 이 전류 소모는 대형 유도 모터의 시동 문제를 일으킬 수 있습니다.
NEMA 및 IEC 모터 클래스
토크 곡선(아래 그림)에 해당하는 모터의 다양한 표준 클래스(또는 설계)가 다양한 유형의 부하를 더 잘 구동하기 위해 개발되었습니다. National Electrical Manufacturers Association(NEMA)는 이러한 구동 요구 사항을 충족하기 위해 모터 클래스 A, B, C 및 D를 지정했습니다.
유사한 국제 전기 기술 위원회(IEC) 등급 N과 H는 각각 NEMA B와 C 설계에 해당합니다.

NEMA 설계의 특성
D급 모터를 제외한 모든 모터는 전부하에서 5% 이하의 슬립으로 작동합니다.
- 클래스 B(IEC 클래스 N) 모터는 대부분의 애플리케이션에서 사용하는 기본 모터입니다. LRT = FLT의 150%~170%의 시동 토크로 과도한 시동 전류(LRT) 없이 대부분의 부하를 시동할 수 있습니다. 효율과 역률이 높습니다. 일반적으로 펌프, 팬 및 공작 기계를 구동합니다.
- 클래스 A 시동 토크는 클래스 B와 동일합니다. 드롭 아웃 토크와 시동 전류(LRT)가 더 높습니다. 이 모터는 사출 성형 기계에서 발생하는 과도 과부하를 처리합니다.
- 클래스 C(IEC 클래스 H)는 LRT = FLT의 200%에서 클래스 A 및 B보다 시동 토크가 높습니다. 이 모터는 컨베이어, 분쇄기, 왕복 펌프 및 압축기와 같이 일정한 속도로 구동해야 하는 하드 스타트 부하에 적용됩니다.
- D급 모터는 높은 슬립(FLT에서 5%~13%)으로 인해 낮은 시동 전류와 함께 가장 높은 시동 토크(LRT)를 갖습니다. 높은 슬립은 낮은 속도를 초래합니다. 속도 조절이 좋지 않습니다. 그러나 이 모터는 에너지 저장 플라이휠이 필요한 것과 같은 매우 가변적인 속도 부하를 구동하는 데 탁월합니다. 적용 분야로는 펀치 프레스, 전단기, 엘리베이터가 있습니다.
- E형 모터는 B형 모터보다 효율이 더 높은 버전입니다.
- F급 모터는 B급 모터보다 LRC, LRT, 분해 토크가 훨씬 낮습니다. 이 모터는 일정하고 시동이 쉬운 부하를 구동합니다.
유도 전동기의 역률
유도 모터는 전력선에 지연(유도) 역률을 나타냅니다. 대형 완전 부하 고속 모터의 역률은 대형 고속 모터의 경우 최대 90%까지 유리할 수 있습니다. 3/4 완전 부하에서 가장 큰 고속 모터 역률은 92%가 될 수 있습니다.
소형 저속 모터의 역률은 50% 정도로 낮을 수 있습니다. 시동 시 역률은 10%~25% 범위에 있을 수 있으며 로터가 속도에 도달함에 따라 상승합니다.
역률(PF)은 모터 기계적 부하에 따라 상당히 다릅니다(아래 그림). 무부하 모터는 2차에 저항 부하가 없는 변압기와 유사합니다. 2차(로터)에서 1차(스테이터)로 반사되는 저항은 거의 없습니다.
따라서 전력선은 10% PF만큼 낮은 무효 부하를 봅니다. 회전자가 부하를 받으면 증가하는 저항 성분이 회전자에서 고정자로 반사되어 역률이 증가합니다.

유도 전동기의 역률 및 효율
유도 전동기의 효율성
대형 3상 모터는 소형 3상 모터보다 효율적이며, 대부분의 단상 모터보다 효율적입니다. 대형 유도 모터 효율은 최대 부하에서 95%까지 높을 수 있지만, 90%가 더 일반적입니다.
경부하 또는 무부하 유도 모터의 효율은 대부분의 전류가 자화 플럭스를 유지하는 데 사용되기 때문에 좋지 않습니다. 토크 부하가 증가함에 따라 토크를 생성하는 데 더 많은 전류가 소모되는 반면 자화와 관련된 전류는 고정됩니다. 75% FLT에서의 효율은 100% FLT에서의 효율보다 약간 높을 수 있습니다.
효율성은 50% FLT에서 몇 퍼센트 감소하고 25% FLT에서 몇 퍼센트 더 감소합니다. 효율성은 25% FLT 이하에서만 나빠집니다. 부하에 따른 효율성의 변화는 위 그림에 나와 있습니다.
유도 모터는 일반적으로 기계적 부하가 모든 작동 조건에서 시동되고 구동될 수 있도록 보장하기 위해 과대하게 제작됩니다. 다상 모터가 효율이 최고조에 달하는 정격 토크의 75% 미만으로 부하되는 경우 효율은 FLT 25%까지 약간만 떨어집니다.
Nola 파워 팩터 교정기
NASA의 프랭크 놀라는 1970년대 후반에 단상 유도 모터의 에너지 절약 장치로 역률 보정기(PFC)를 제안했습니다. 이는 완전 부하가 아닌 유도 모터는 효율이 낮고 완전 부하 모터보다 역률이 낮다는 전제에 근거합니다. 따라서 부분 부하 모터, 특히 1-φ 모터에서는 에너지를 절약할 수 있습니다.
스테이터 자기장을 유지하는 데 소모되는 에너지는 부하 변화에 비해 비교적 고정되어 있습니다. 완전히 부하된 모터에서는 절약할 것이 없지만, 부분적으로 부하된 모터의 전압을 낮추어 자기장을 유지하는 데 필요한 에너지를 줄일 수 있습니다.
이렇게 하면 역률과 효율이 증가합니다. 이는 의도된 대로 악명 높게 비효율적인 단상 모터에 적합한 개념이었습니다.
이 개념은 대형 3상 모터에는 그다지 적용되지 않습니다. 높은 효율(90%+)로 인해 절약할 에너지가 많지 않습니다. 게다가 95% 효율 모터는 50% 전체 부하 토크(FLT)에서 여전히 94% 효율이고 25% FLT에서 90% 효율입니다.
100% FLT에서 25% FLT로 전환할 때의 잠재적 에너지 절감은 효율성 차이 95% - 90% = 5%입니다. 이는 전체 부하 와트수의 5%가 아니라 감소된 부하에서의 와트수의 5%입니다. Nola 역률 보정기는 펀치 프레스와 같이 대부분 시간(25% FLT 미만)을 공회전하는 3상 모터에 적용할 수 있습니다.
비싼 전자 컨트롤러의 회수 기간은 대부분 애플리케이션에 매력적이지 않은 것으로 추정됩니다. 하지만 전자 모터 스타터 또는 속도 제어의 일부로 경제적일 수 있습니다.
교류 발전기로서의 유도 전동기
유도 모터는 동기 속도의 100%보다 큰 토크로 구동되는 경우 교류 발전기로 작동할 수 있습니다(아래 그림). 이는 몇 %의 "음의" 슬립, 예를 들어 -1% 슬립에 해당합니다.
즉, 동기 속도보다 모터를 더 빨리 회전시키면 로터는 스테이터 회전 자기장보다 1% 더 빨리 전진합니다. 일반적으로 모터에서는 1% 뒤처집니다. 로터가 스테이터 자기장을 반대 방향으로 절단(선행)하기 때문에 로터는 스테이터에 전압을 유도하여 전기 에너지를 전력선으로 다시 공급합니다.

음의 토크는 유도 전동기를 발전기로 만든다
이러한 유도 발전기는 50 또는 60Hz의 "활성" 전원에 의해 여기되어야 합니다. 전력 회사의 정전이 발생하면 전력을 생성할 수 없습니다. 이러한 유형의 발전기는 대기 전원으로는 적합하지 않은 것으로 보입니다.
보조 전력 풍력 터빈 발전기로, 수리 인력을 보호하기 위한 자동 정전 차단 스위치가 필요 없다는 장점이 있습니다.
이는 실패가 없습니다.
작은 원격(전력망에서) 설비는 스테이터 위상과 병렬로 커패시터를 배치하여 자체 여자를 만들 수 있습니다 . 부하가 제거되면 잔류 자기가 소량의 전류 흐름을 생성할 수 있습니다.
이 전류는 전력을 소모하지 않고 커패시터에 의해 흐를 수 있습니다. 발전기가 최대 속도로 올라가면 전류 흐름이 증가하여 스테이터에 자화 전류를 공급합니다. 이 지점에서 부하를 적용할 수 있습니다. 전압 조절이 좋지 않습니다. 유도 모터는 커패시터를 추가하여 자려 발전기로 변환할 수 있습니다.
시동 절차는 스테이터에 정상 전력선 전압을 적용하여 풍력 터빈을 모터 모드로 속도를 높이는 것입니다. 동기 속도를 초과하는 풍력 유도 터빈 속도는 음의 토크를 발생시켜 전력을 전력선으로 다시 공급하여 전기 킬로와트시 미터의 정상 방향을 반전시킵니다.
유도 모터는 전력선에 지연 역률을 나타내는 반면, 유도 발전기는 선행 역률을 나타냅니다. 유도 발전기는 기존 발전소에서 널리 사용되지 않습니다.
증기 터빈 구동의 속도는 동기 발전기의 요구에 따라 안정적이고 제어 가능합니다. 동기 발전기는 또한 더 효율적입니다.
풍력 터빈의 속도는 제어하기 어렵고 돌풍에 의한 풍속 변화에 영향을 받습니다. 유도 발전기는 고유한 미끄러짐으로 인해 이러한 변화에 더 잘 대처할 수 있습니다. 이는 동기 발전기보다 기어 트레인과 기계 구성 요소에 덜 부담을 줍니다.
그러나 이 허용 속도 변화는 약 1%에 불과합니다. 따라서 직접 회선으로 연결된 유도 발전기는 풍력 터빈에서 고정 속도로 간주됩니다( 진정한 가변 속도 발전기의 경우 이중 공급 유도 발전기 참조).
여러 대의 발전기 또는 공통 샤프트에 있는 여러 개의 권선을 바꾸어 가변적인 바람 조건에 맞게 높고 낮은 속도를 제공할 수 있습니다.
모터 시동 및 속도 제어
일부 유도 모터는 시동 시 전체 부하 전류의 1000% 이상을 소모할 수 있지만, 몇 백 퍼센트가 더 일반적입니다. 몇 킬로와트 이하의 소형 모터는 전력선에 직접 연결하여 시동할 수 있습니다.
대형 모터를 시동하면 라인 전압이 떨어져 다른 부하에 영향을 미칠 수 있습니다. 모터 시동 정격 회로 차단기(슬로우 블로우 퓨즈와 유사)는 몇 킬로와트의 모터를 시동하는 표준 회로 차단기를 대체해야 합니다. 이 차단기는 시동하는 동안 높은 과전류를 허용합니다.

자동변압기 유도전동기 시동기
50kW 이상의 모터는 모터 스타터를 사용하여 전체 부하 전류의 수백에서 수백 퍼센트로 라인 전류를 줄입니다. 간헐적 듀티 자동 변압기는 시작 간격 동안 스테이터 전압을 1분의 1초 동안 줄인 다음 위 그림과 같이 전체 라인 전압을 적용할 수 있습니다.
S 접점을 닫으면 시작 간격 동안 전압이 감소합니다. S 접점은 열리고 R 접점은 시작 후 닫힙니다. 이렇게 하면 시작 전류가 전체 부하 전류의 200%로 줄어듭니다. 자동 변압기는 짧은 시작 간격에만 사용되므로 연속 작동 장치보다 상당히 작은 크기를 가질 수 있습니다.
단상 공급에서 3상 모터 실행
3상 모터는 단상 모터만큼 단상에서 쉽게 작동합니다. 두 모터 모두 유일한 문제는 시동입니다. 3상 공급이 예상되는 경우 단상에서 사용하기 위해 3상 모터를 구입하는 경우가 있습니다.
전력 정격은 사용하지 않는 권선 하나를 보충하기 위해 비슷한 단상 모터보다 50% 더 커야 합니다. 단상은 세 번째 권선과 직렬로 연결된 스타트 커패시터와 동시에 한 쌍의 권선에 적용됩니다.
아래 그림에서 모터 시동 시 시동 스위치가 열립니다. 때때로 시동 커패시터보다 작은 커패시터가 작동 중에 유지됩니다.

단상으로 3상 모터 시동하기
위 그림에서 3상 모터를 단상으로 구동하기 위한 회로는 모터 샤프트에 부하가 걸리지 않으면 정적 위상 변환기 로 알려져 있습니다. 게다가 모터는 3상 발전기 역할을 합니다.
3상 전력은 다른 3상 장비에 전력을 공급하기 위해 3개의 스테이터 권선에서 추출될 수 있습니다. 커패시터는 시작을 위해 ∠180° 단상 전원 단자 사이의 약 중간 ∠90°에 합성 위상을 공급합니다.
모터는 작동하는 동안 위에 표시된 대로 대략 표준 3-φ를 생성합니다. Matt Isserstedt는 가정용 기계 공장에 전력을 공급하기 위한 완전한 설계를 보여줍니다.

셀프 스타팅 정적 위상 변환기. 런 커패시터 = HP당 25-30µF. 그림 7에서 수정, Hanrahan
정적 위상 변환기에는 토크 부하가 없으므로 일반적인 스타트 커패시터보다 상당히 작은 커패시터로 시작할 수 있습니다. 충분히 작다면 회로에 런 커패시터로 남겨둘 수 있습니다(위 그림 참조).
그러나 더 작은 런 커패시터는 더 나은 3상 전력 출력을 가져옵니다. 게다가, 3상에서 측정된 전류를 균등화하기 위해 이러한 커패시터를 조정하면 가장 효율적인 기계가 됩니다. 그러나 컨버터를 빠르게 시작하려면 약 1초 동안 큰 스타트 커패시터가 필요합니다. Hanrahan은 구성 세부 정보를 제공합니다.

더 효율적인 정적 위상 변환기. 시작 커패시터 = 50-100µF/HP. 실행 커패시터 = 12-16µF/HP. 그림 1에서 수정, Hanrahan
다중 필드를 갖는 유도 모터
유도 모터는 여러 개의 계자 권선을 포함할 수 있습니다. 예를 들어 1800 및 900 rpm 동기 속도에 해당하는 4극 및 8극 권선입니다. 한 계자 또는 다른 계자에 전원을 공급하는 것은 스테이터 코일을 다시 배선하는 것보다 덜 복잡합니다.
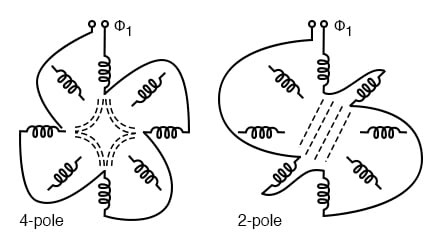
여러 필드를 사용하면 속도를 변경할 수 있습니다.
필드가 리드를 꺼낸 상태로 분할된 경우 위에 표시된 2상 모터의 경우와 같이 4극에서 2극으로 다시 배선(또는 전환)할 수 있습니다. 22.5° 세그먼트는 45° 세그먼트로 전환할 수 있습니다. 명확성을 위해 위에는 한 위상에 대한 배선만 표시되어 있습니다.
따라서, 우리의 유도 모터는 여러 속도로 작동할 수 있습니다. 위의 60Hz 모터를 4극에서 2극으로 전환하면 동기 속도가 1800rpm에서 3600rpm으로 증가합니다.
질문: 모터가 50Hz로 구동되는 경우, 해당 4극 및 2극 동기 속도는 얼마입니까?
에이:
N s = 120f/P = 120*50/4 = 1500 rpm (4극) N s = 3000 rpm (2극)
가변 전압을 갖춘 유도 모터
팬 구동과 같은 응용 분야에서 소형 다람쥐 케이지 유도 모터의 속도는 라인 전압을 줄임으로써 변경될 수 있습니다. 이렇게 하면 부하에 사용 가능한 토크가 감소하여 속도가 감소합니다(아래 그림 참조).

가변 전압은 유도 전동기 속도를 제어합니다.
유도 전동기의 전자 속도 제어
최신 솔리드 스테이트 전자 장치는 속도 제어 옵션을 늘립니다. 50 또는 60Hz 라인 주파수를 더 높거나 낮은 값으로 변경하면 모터의 동기 속도가 변경될 수 있습니다. 그러나 모터에 공급되는 전류의 주파수를 낮추면 리액턴스 X L 도 감소하여 스테이터 전류가 증가합니다.
이로 인해 스테이터 자기 회로가 포화되어 재앙적인 결과가 발생할 수 있습니다. 실제로는 주파수가 감소하면 모터에 대한 전압도 감소해야 합니다.

전자식 가변속도 구동
반대로, 모터의 동기 속도를 높이기 위해 구동 주파수를 높일 수 있습니다. 그러나 전류를 정상 값으로 유지하고 토크를 유지하려면 리액턴스 증가를 극복하기 위해 전압을 높여야 합니다.
인버터는 펄스 폭 변조 출력으로 모터에 사인파를 근사합니다. 이것은 켜짐 또는 꺼짐, 높음 또는 낮음인 잘린 파형이며, "켜짐" 시간의 백분율은 순간 사인파 전압에 해당합니다.
전자기술이 유도 전동기 제어에 적용되면 간단한 것부터 복잡한 것까지 다양한 제어 방법을 사용할 수 있습니다.
- 스칼라 제어: 피드백 없이 전압과 주파수만 제어하는 위에 설명된 저비용 방법입니다.
- 벡터 제어: 벡터 위상 제어라고도 합니다. 스테이터 전류의 플럭스 및 토크 생성 구성 요소는 모터 토크-속도 곡선을 향상시키기 위해 실시간으로 측정되거나 추정됩니다. 이는 계산 집약적입니다.
- 직접 토크 제어: 정교한 적응 모터 모델은 피드백 없이 플럭스와 토크를 보다 직접적으로 제어할 수 있습니다. 이 방법은 부하 변화에 빠르게 대응합니다.
테슬라 다상 유도 모터 요약
- 다상 유도 전동기는 적층 고정자에 매립된 다상 권선과 적층 회전자에 매립된 전도성 농형 권선으로 구성됩니다.
- 스테이터 내부에서 흐르는 3상 전류는 회전 자기장을 생성하여 로터에 전류와 그에 따른 자기장을 유도합니다. 로터 토크는 로터가 회전 스테이터 필드 뒤에서 약간 미끄러지면서 발생합니다.
- 단상 모터와 달리 다상 유도 모터는 자체 시동이 가능합니다.
- 모터 스타터는 전력선의 부하를 최소화하는 동시에 작동 중 필요한 것보다 더 큰 시동 토크를 제공합니다. 라인 전류 감소 스타터는 대형 모터에만 필요합니다.
- 3상 모터는 시동하면 단상으로 작동합니다.
- 정적 위상 변환기 는 샤프트 부하가 없는 단상으로 구동되는 3상 모터로 3상 출력을 생성합니다.
- 극의 수를 변경하면 여러 개의 계자 권선을 여러 개의 개별 모터 속도에 맞게 다시 배선할 수 있습니다.
선형 유도 모터
유도 모터의 권선 고정자와 스쿼럴 케이지 회전자는 원주에서 절단되어 선형 유도 모터로 펼쳐질 수 있습니다. 선형 이동 방향은 고정자 위상에 대한 구동 순서에 의해 제어됩니다.
선형 유도 전동기는 고속 여객 열차의 구동 장치로 제안되었습니다. 지금까지, 매끄러운 주행에 필요한 자기 반발 부상 시스템이 포함된 선형 유도 전동기는 실험 설비를 제외하고는 비용이 너무 많이 들었습니다.
그러나 선형 유도 모터는 2013년 차세대 해군 항공모함 CVNX-1의 증기 구동식 사출기 항공기 발사 시스템을 대체할 예정입니다. 이를 통해 효율성이 높아지고 유지 관리가 줄어들 것입니다.